4xidraw Clone
desde cero

¿Qué es y por qué construirlo?
Un plotter CNC es una máquina de dos ejes que arrastra un bolígrafo sobre papel siguiendo coordenadas en GCode. El Axidraw comercial cuesta más de 500€. Este es un clon basado en el diseño open source 4xidraw de MISAN — piezas en PLA, Arduino UNO como cerebro, y dos motores paso a paso para los ejes X e Y. En 2018 todavía no tenía impresora 3D propia, así que encargué todas las piezas estructurales a una empresa de impresión local.
Lo que necesitas
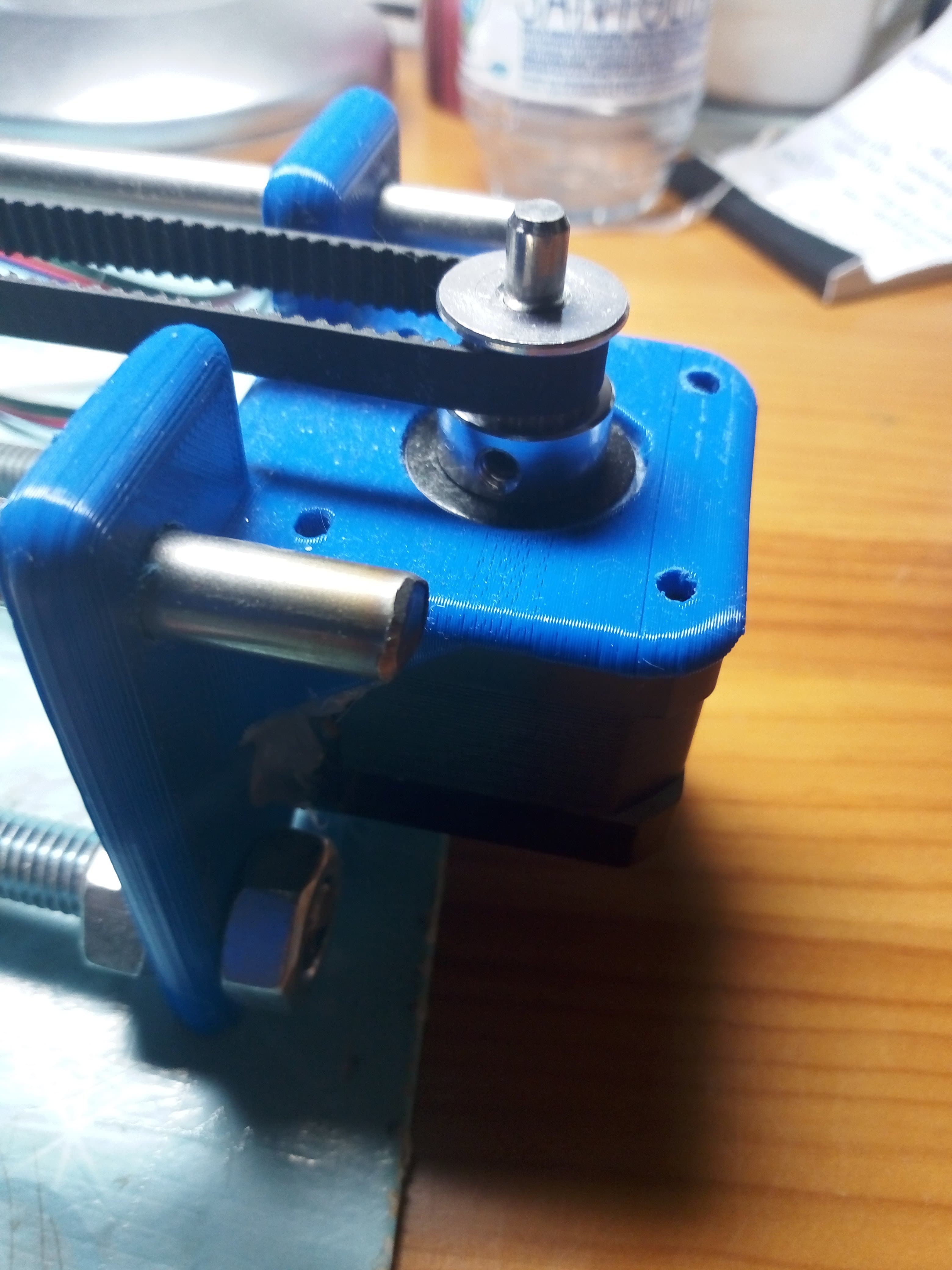
Piezas 3D y montaje
Modelo base
4xidraw de MISAN
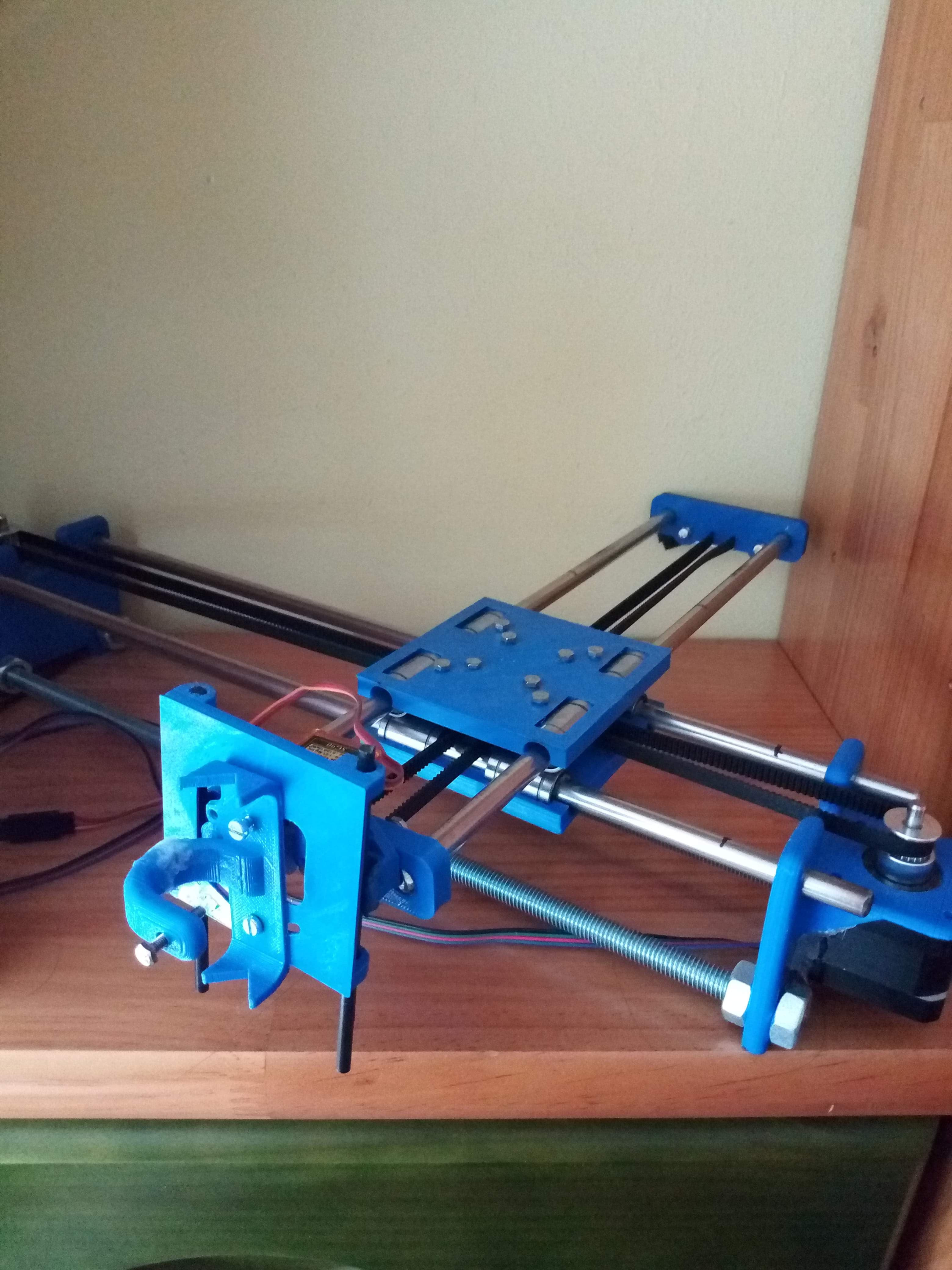
El diseño está en Thingiverse (thing:2301776). Son 13 piezas en PLA: bases del eje X, base central con rodamientos, tensor de correa, sujeta-servo y dos opciones de porta-bolígrafo (vertical y 30°/45°). Las encargué a una empresa porque en 2018 todavía no tenía impresora 3D.
Mecanismo del eje Z
Servo + cremallera
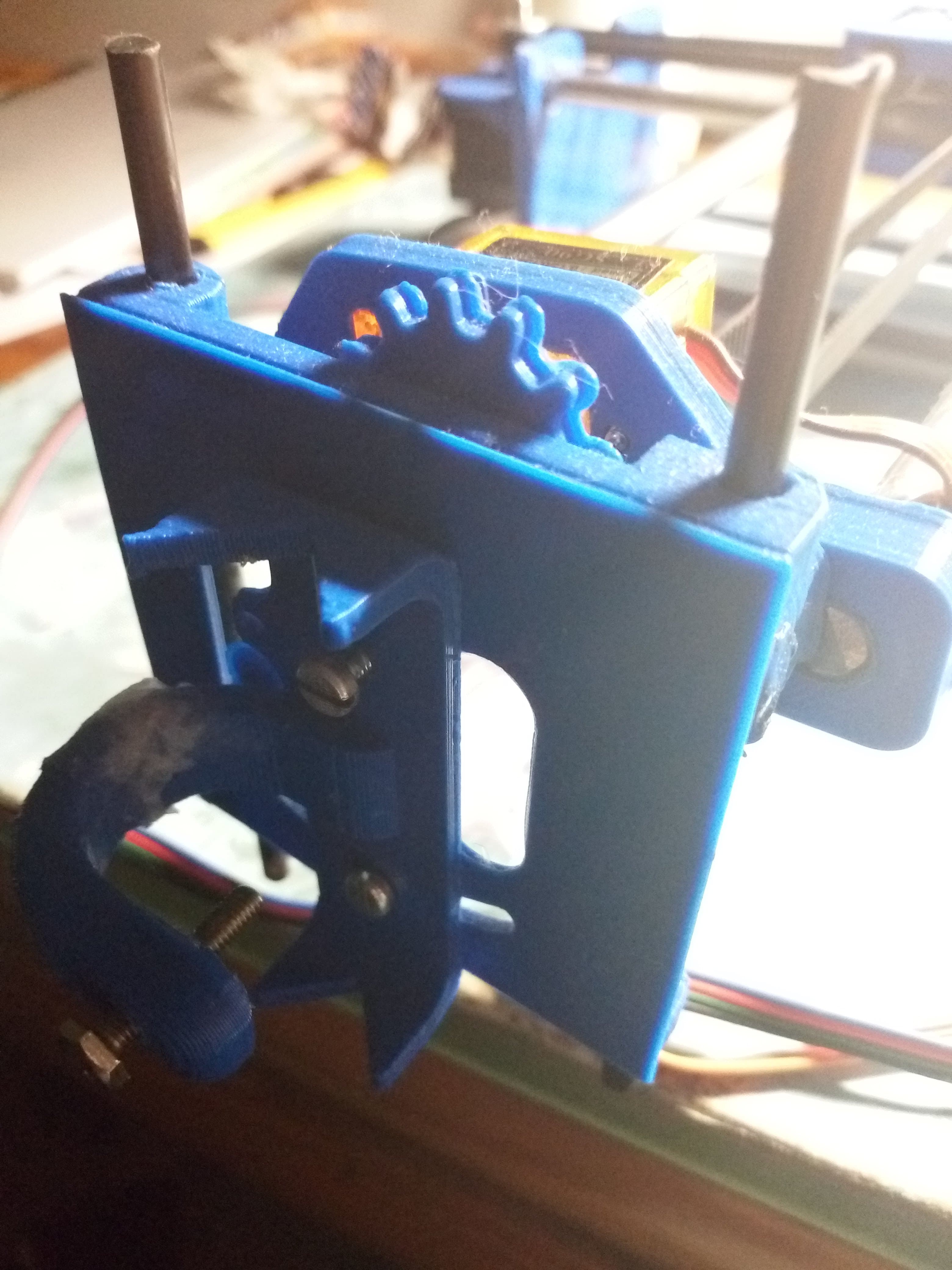
El servo SG90 mueve un engranaje que empuja o suelta la pieza con cremallera donde va el bolígrafo. En M3 s0 (posición «baja»), la zona sin dientes queda frente a la cremallera y el bolígrafo cae por su propio peso. En M3 s50, los dientes empujan la cremallera hacia arriba. No usar s100: la pieza choca con el sujeta-servo y descoloca el engranaje.
Arduino + CNC Shield
Conexiones clave
Dos alimentaciones separadas
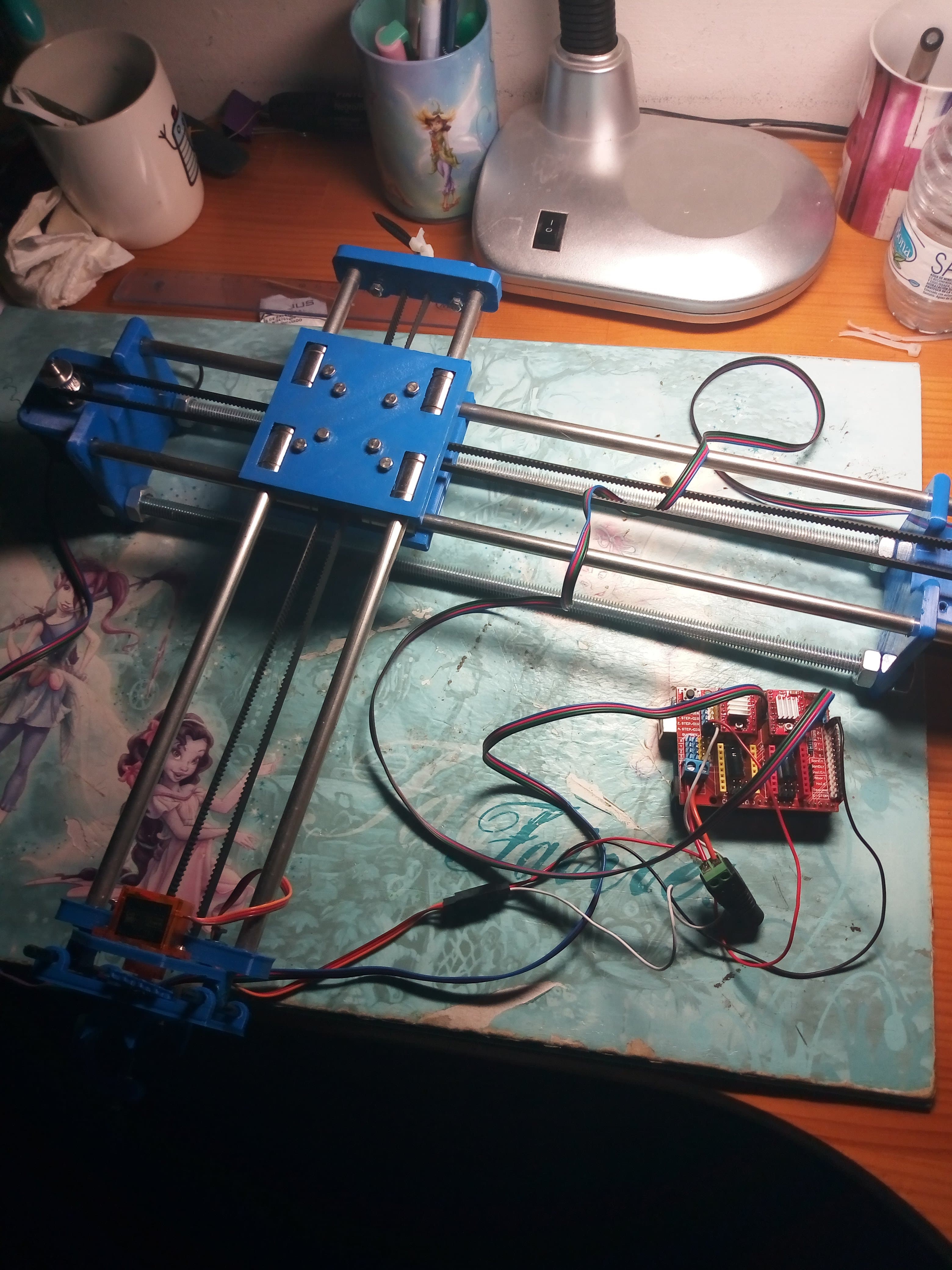
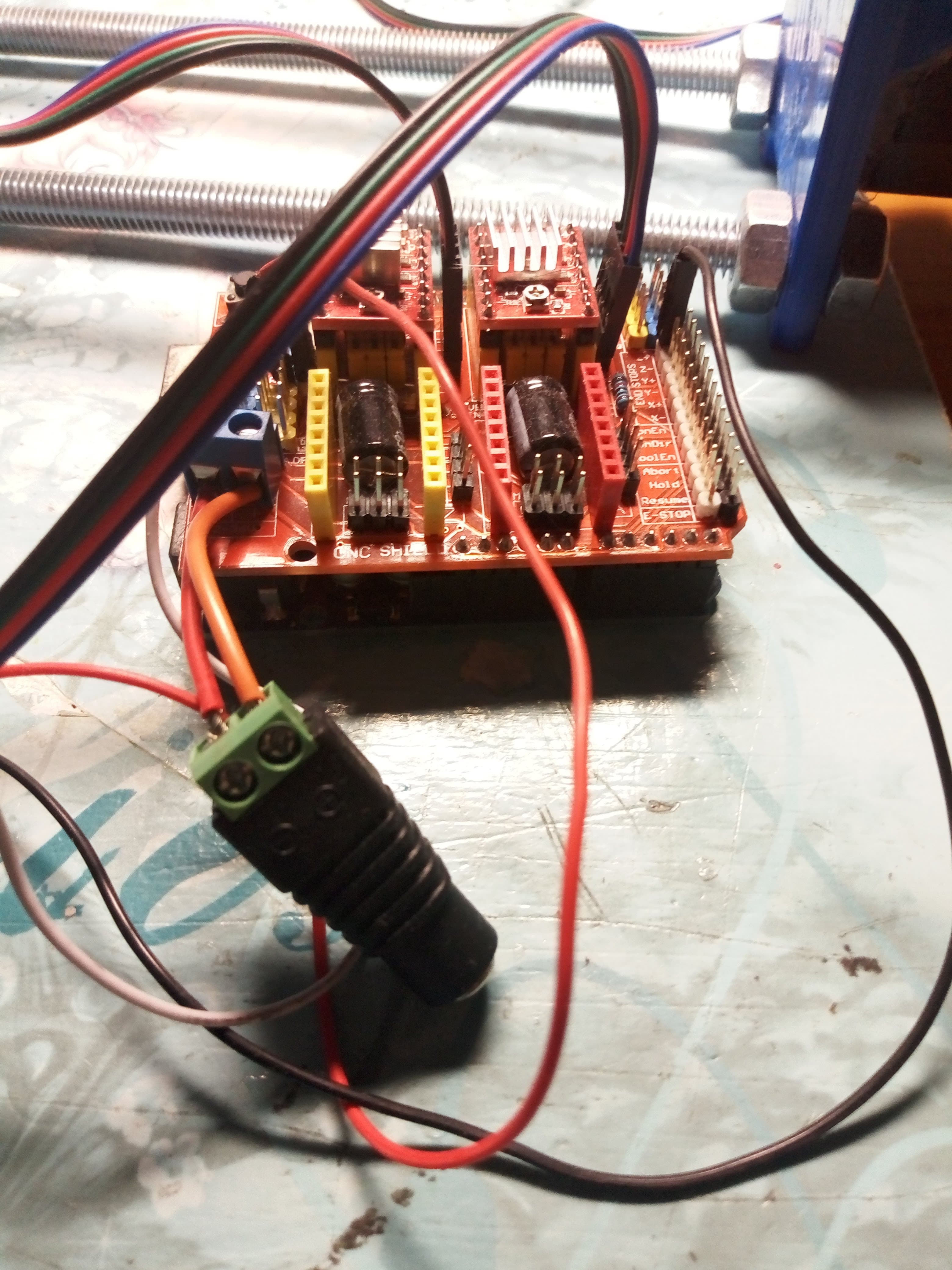
La CNC Shield v3 se apila directamente sobre el Arduino UNO. Los dos A4988 van en los slots X e Y. El servo SG90 conecta a Z+ (señal), 5V y GND. Los motores necesitan 12V 2A desde una fuente externa por la clema de la Shield — el Arduino se alimenta por USB desde el ordenador.
GRBL 1.1
GRBL es un firmware open source para Arduino UNO que interpreta GCode y controla los motores paso a paso. Se carga desde el IDE de Arduino con la librería grbl-master. Una vez en la placa, la comunicación es a 115200 baudios por puerto serie.
La guía de referencia (LSM) era un punto de partida, pero los valores no funcionaban igual con mi montaje. $100 y $101 hay que calibrarlos empíricamente: ordenar moverse 100mm, medir cuánto se desplaza de verdad, y ajustar hasta que coincidan.
Inkscape + GrblPanel
Generar el GCode
Inkscape 0.91 + plugin J Tech
Se usa Inkscape 0.91 con el plugin J Tech Photonics (modificado por MISAN para plotters). El flujo: abrir imagen → Trayecto → Vectorizar mapa de bits → seleccionar todo → Extensiones → J Tech → exportar .gcode. El problema es que el plugin está pensado para láseres y el GCode que genera necesita correcciones manuales para funcionar con servo.
El paso imprescindible: editar el GCode a mano
El plugin añade un s0 de más tras las órdenes del servo y los retardos son 0 — el servo no tiene tiempo de moverse antes de que el plotter empiece a trazar. Hay que abrir el .gcode con Notepad++ y hacer tres reemplazos globales usando la opción Especial → Salto de línea manual:
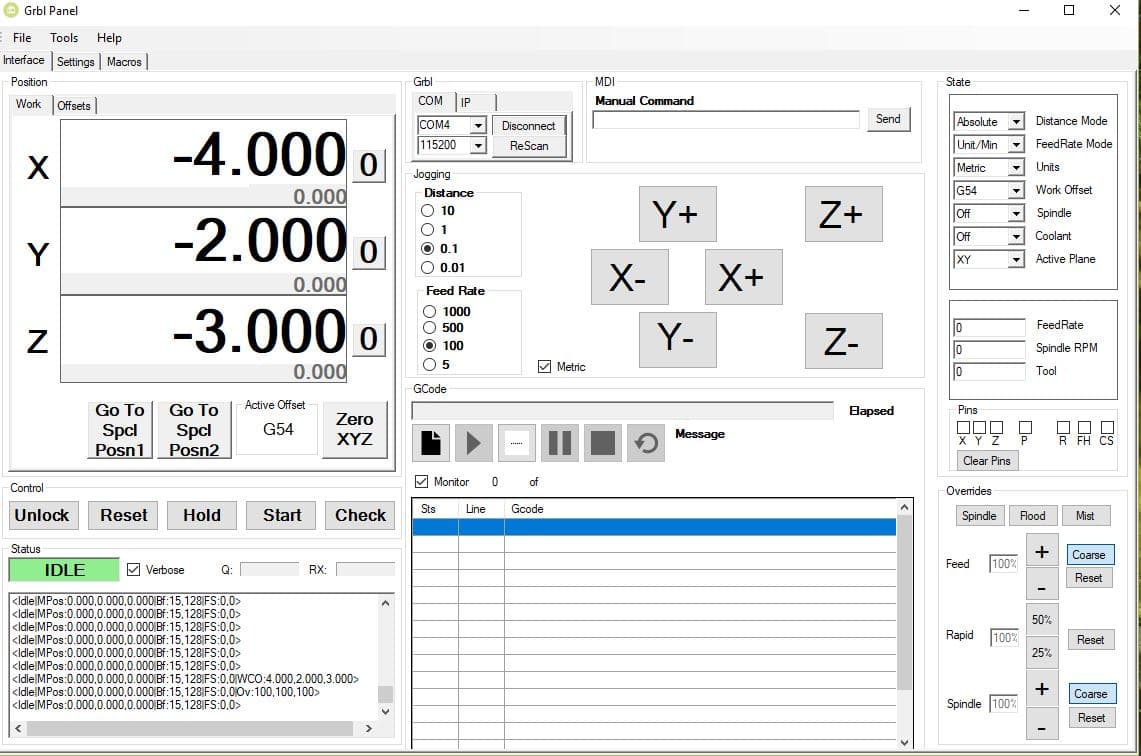
Una vez corregido el archivo, se abre GrblPanel.exe, se conecta al COM del Arduino a 115200 baudios, se carga el .gcode y se pulsa Start.
Capturas de configuración
GrblPanel es la interfaz gráfica para controlar el plotter: jogging manual en X/Y, configurar los parámetros $$ en tiempo real, ver posición y enviar el archivo GCode.


Cómo funciona en la práctica

El plotter dibuja cualquier imagen que se pueda vectorizar en Inkscape — contornos, tramas de puntos, rellenos con líneas paralelas. El dibujo más largo que hice fue Mike Wazowski en un folio A4, tardó casi media hora. El proceso tiene algo hipnótico: el bolígrafo se mueve solo, sube, baja, y la imagen aparece poco a poco sobre el papel.
Lo que más aprendí: en hardware, el 80% del trabajo es calibrar y depurar, no construir. Y que leer la fuente primaria — el wiki de GRBL en GitHub — vale infinito más que seguir una guía que puede no aplicar exactamente a tu setup.